News | company news | Sep 26,2024
Against the backdrop of the increasing depletion of fossil energy and the increasingly serious environmental pollution problem, the development and utilization of clean energy has attracted more and more attention. The access of clean energy to the distribution network will have a significant impact on the flow direction of the entire distribution network, and ultimately affect the performance of the relay protection device . DC microgrids have the advantages of eliminating the commutation link, reducing costs and losses, and the load is not affected by voltage adjustment, and have become a research hotspot for scholars at home and abroad . However , DC microgrids have a small coverage area, short line length, small capacity, and low voltage level, and traditional protection technologies cannot be well applied. In addition, DC microgrids have problems such as rapid discharge of capacitors, fragility of power electronic devices, and difficulty in protection setting under fault conditions. The traditional low-voltage distribution network overcurrent protection differential coordination is difficult to achieve, and it is difficult to ensure the selectivity of protection. It is not completely suitable for DC microgrids . The lag in protection technology has restricted the promotion and development of DC microgrids.
At present, the most widely used protection methods for DC microgrids are single-ended protection and communication-based protection . Single-ended protection may have difficulties in fault detection and location, and it is difficult to ensure the selectivity of protection. For DC microgrids, the possibility of false operation is relatively high ; communication-based protection uses a large number of sensors and communication equipment , which increases the HYPERLINK “javascript:;” complexity HYPERLINK “javascript:;” and cost of the system. Reference first proposed the idea of control and protection coordination that combines current limiting means with DC protection, and applied this idea to the distance measurement protection of ring DC microgrids. The single-ended accurate fault location is achieved by accurately solving the end current, but this scheme is only applicable to ring DC microgrids. Reference , based on reference , divides the control and protection coordination scheme into three stages: fault control, fault location, and fault isolation according to the execution time sequence. By modifying the converters of each branch, the fault current is effectively suppressed, providing an application basis for the subsequent configuration of low-voltage DC microgrid fault isolation schemes. However, this document lacks a systematic protection setting value setting principle, and the scope of application is not clear. Reference proposes a protection scheme for the power supply system of the submarine observation network based on the control and protection coordination idea and introduces in detail the protection setting value configuration principles of each branch, but it is not applicable to DC microgrids.
In summary, the application of the control and protection coordination idea to DC microgrid protection has attracted the attention of many scholars, but there is still a lack of systematic demonstration on the requirements for current limiting effect and how to coordinate with protection. Based on the existing current limiting technology, this paper proposes an overcurrent protection method that integrates with fault current limiting. The fault current control target is coordinated with the setting value of the overcurrent protection to achieve extreme difference coordination, so that the traditional three-stage overcurrent protection can be well applied to the protection of DC microgrids.
Overcurrent protection has the advantages of being simple and reliable. Under normal circumstances, it can meet the requirements of rapid fault removal and is widely used in medium and low voltage AC power distribution systems of 35 kV and below.
The coordination and actual action time of typical stage current protection are shown in Figure 1. For the load at the end of the power grid, protection 1 generally adopts instantaneous quick-break protection to meet the protection requirements. Its setting value is set according to the load current under the maximum operation mode. Other protections in the power grid need to cooperate with protection 1 in terms of setting value and time limit. Time-limited current quick-break protection can be added . The closer to the power supply end, the greater the overcurrent amplitude and the longer the action time limit of the overcurrent protection. Therefore, the protection close to the power supply end generally needs to be equipped with three-stage protection.
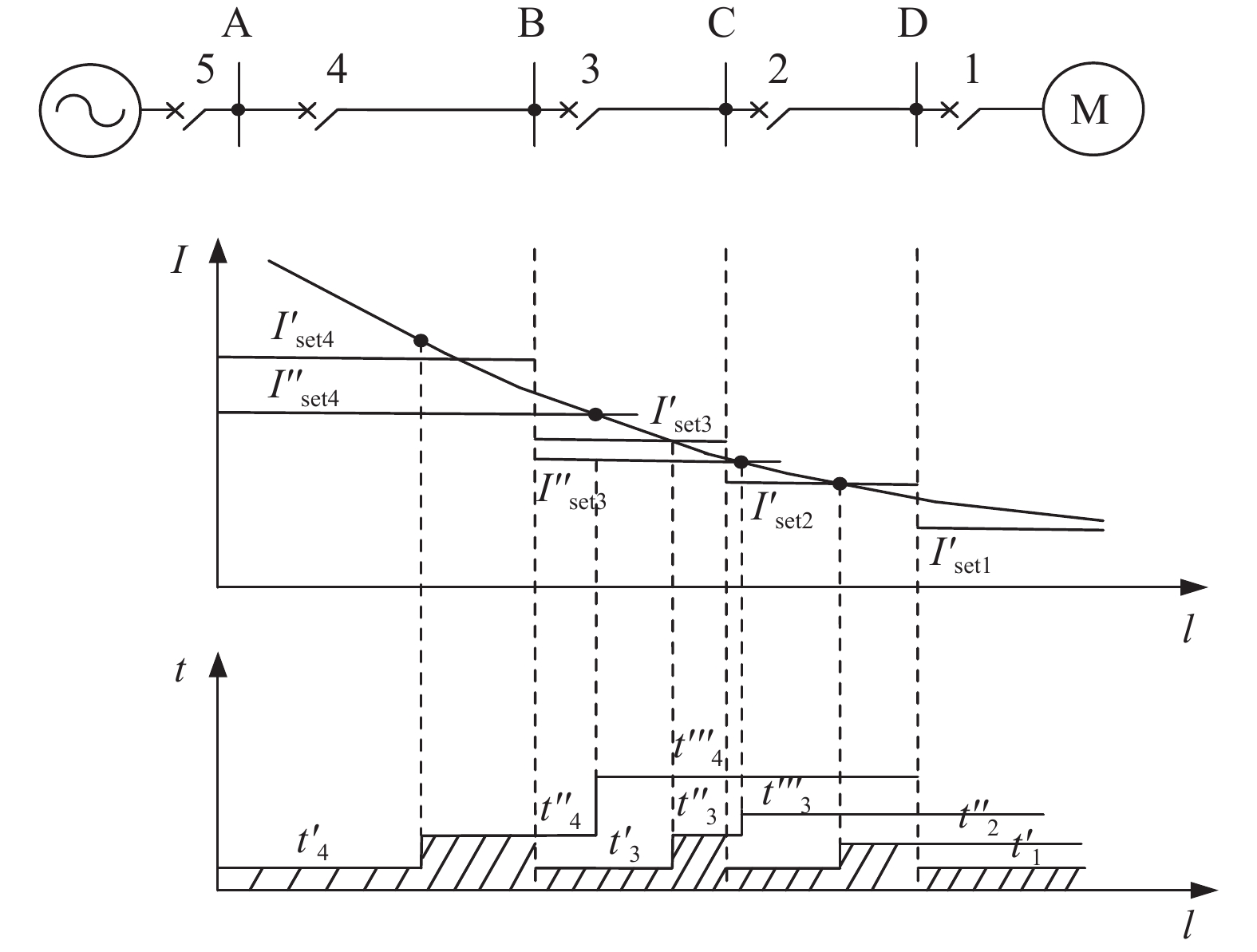
Figure 1 Coordination and actual operating time of stage current protection
Download: Full size image Slideshow
For the typical DC microgrid shown in Figure 2 , the power modules in the network include AC/DC access modules, photovoltaic power generation modules, wind power generation modules, and energy storage modules, and the load modules include charging piles and pure resistive loads. Taking the short circuit fault of the charging pile branch as an example for analysis, the currents of each branch before and after the fault are shown in Figure 3.
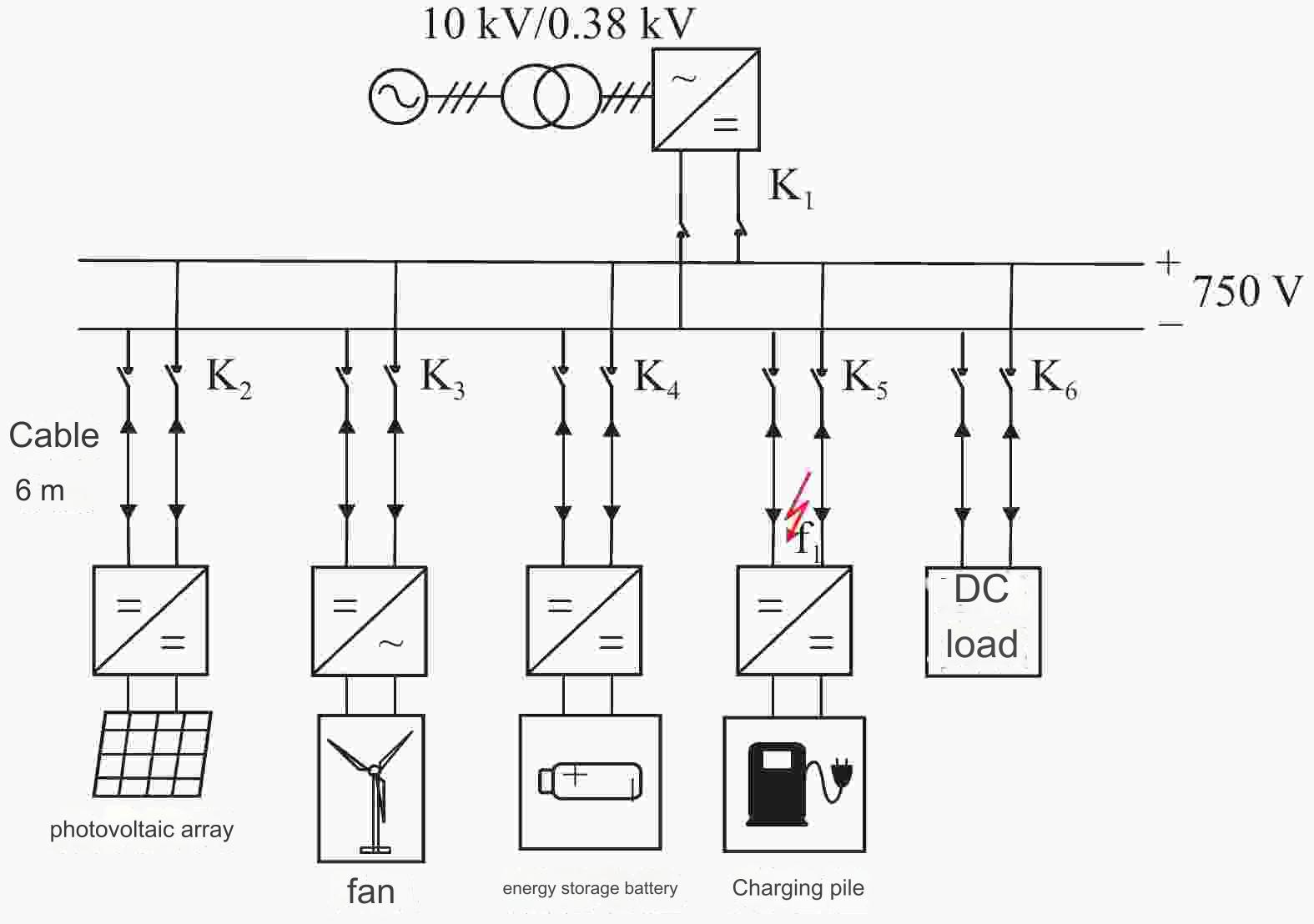
Figure 2 Typical DC microgrid charging pile branch fault
Download: Full size image Slideshow
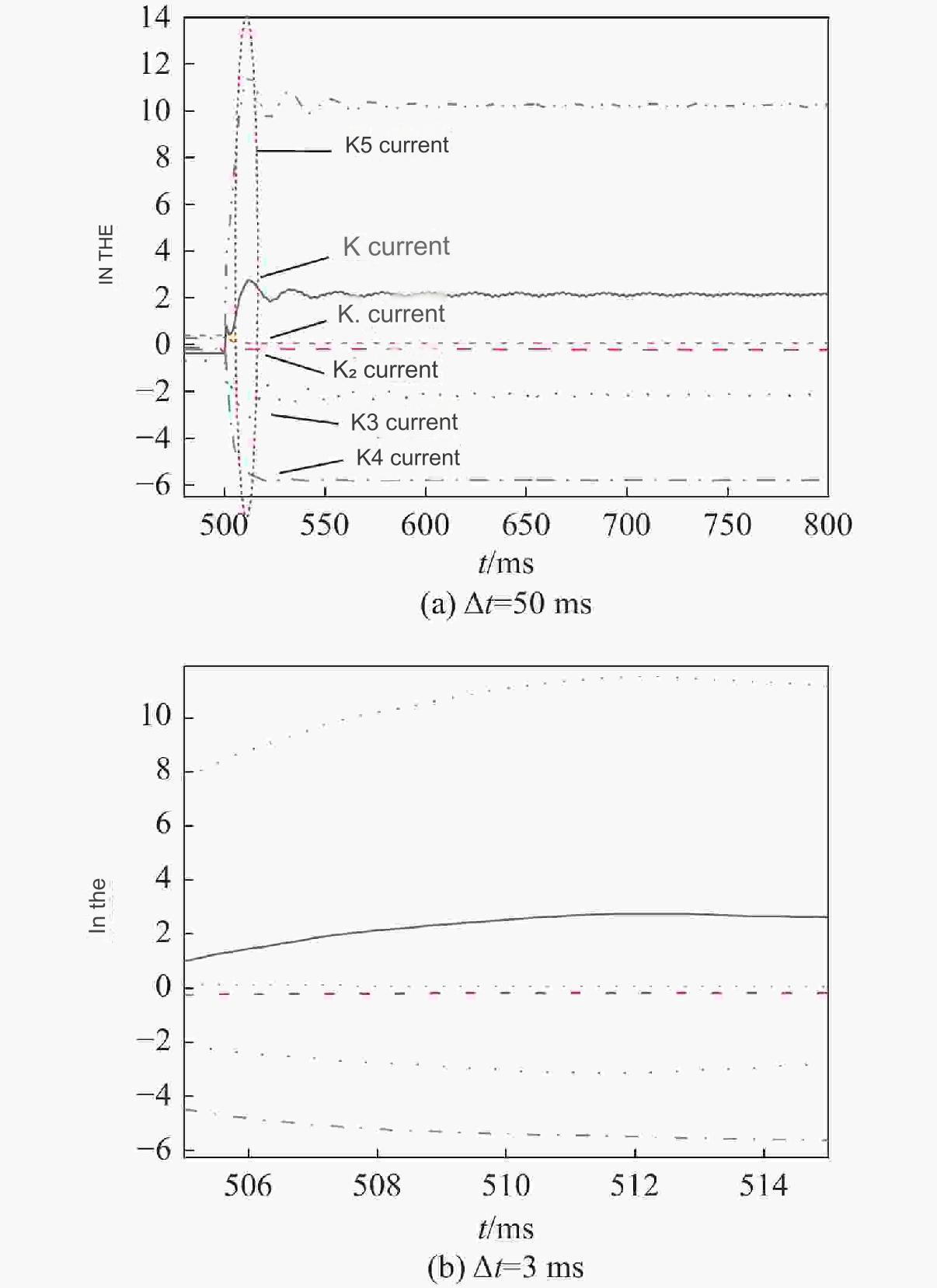
Figure 3. Current waveforms of each branch when a DC microgrid charging pile branch fails
Download: Full size image Slideshow
It can be seen that when a DC microgrid has an inter-pole fault, a huge impact current will be generated. Due to the large number of power supply terminals, short lines, low impedance, and fast rise of fault current, within 5 ms after the fault, many branches will rise to more than 10 times the normal operation. Therefore, for DC microgrids, if the overcurrent protection described in the previous section is still used, it will be difficult to achieve extreme difference coordination, resulting in poor protection.
At present, fault current control technology is mainly divided into two categories. One is to make the fault current within an acceptable range through reasonable system design and configuration when a fault occurs; the other is to accurately control the magnitude of the fault current through some equipment or technical means after the fault occurs. In order to facilitate the setting of the protection setting value, this article recommends the use of fault current control technology to accurately control the fault current provided by each distributed power supply branch. Considering that each distributed power supply generally uses power electronic devices to achieve fault current control, the article sets the fault current control target of each branch to be no more than 2 pu.
For a DC microgrid with multiple power supply branches, the fault current flowing through the fault branch is provided by multiple power supplies, which will definitely be greater than the fault current control value of any single branch. Therefore, the setting value of the stage I protection of each branch is set to 2 pu or slightly smaller, which is greater than the fault current control value and less than the lockout protection value of the power electronic device in the branch. When the bus side fails, the fault current flowing through the circuit breakers of each branch is the branch current. It can be seen that the stage I protection of each branch current will not operate at this time. For this reason, for the power supply branch, the setting value of the stage II protection can be set to be slightly smaller than the branch fault current control value, so that when the bus side fails, each power supply branch can trip through the stage II protection. For the stage III protection, the AC distribution network can be used as a reference, and the setting value can be set to be slightly larger than the maximum load current of normal operation.
The above setting method can realize the protection setting of most DC microgrids, but there are still some special cases that need special consideration, such as the case where there are only two power sources and the case where the capacity of one of the power sources is particularly large.
1) Case with only two power supplies
When there are only two voltage sources in the DC microgrid, as shown in Figure 4. If the capacity of power source 2 is greater than that of power source 1, when a short circuit occurs in the branch of power source 2, the current flowing through circuit breaker k2 is provided by power source 1, which is less than the setting value of the first stage protection of circuit breaker k2, and may also be less than its second stage protection value, resulting in k2 not tripping and the second stage protection of k1 tripping , making the protection lose selectivity. To avoid this situation, in the design of the DC microgrid, the circuit breaker at the power outlet can be used to trip power source 2. However, the fault still cannot be removed, and the second stage protection of power source 1 will still trip. If the circuit breaker at the outlet of power source 2 is linked with circuit breaker k2 , the fault can be removed to ensure that power source 1 will not be removed. This also requires that the second stage setting delay of power source 2 is less than the second stage setting delay of power source 1. When the branch of power source 1 fails, the fault current provided by power source 2 flows through circuit breaker k1, and the first stage protection of circuit breaker k1 trips .
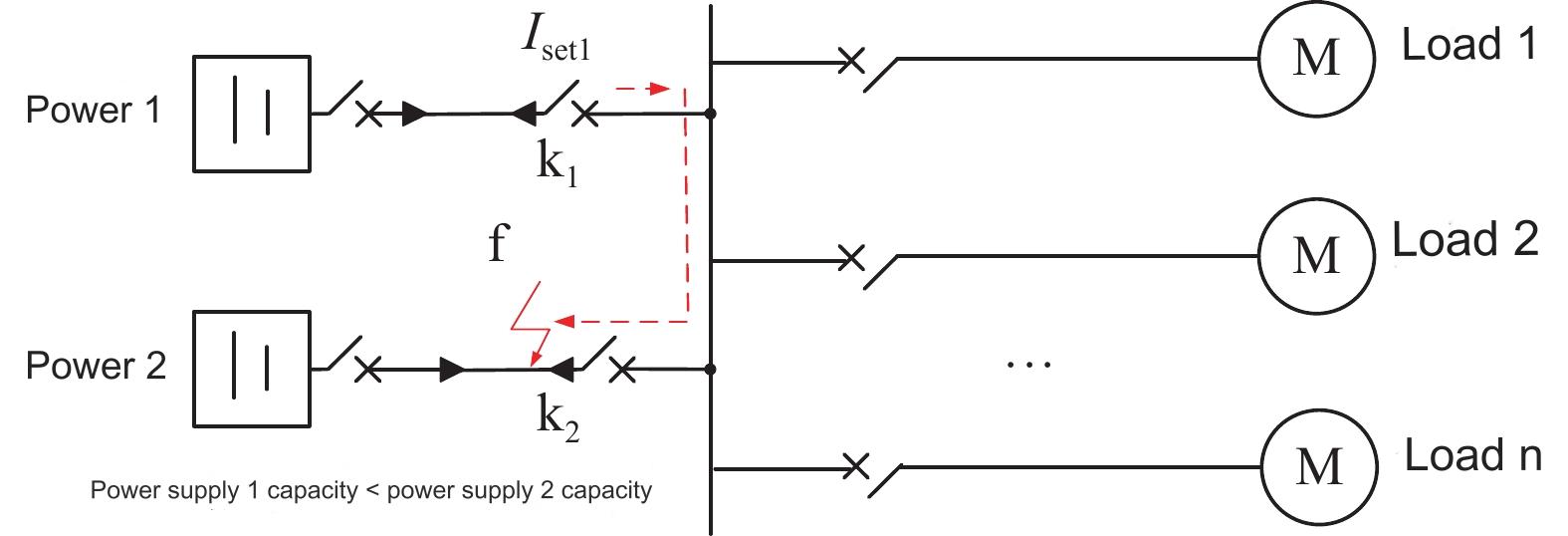
Figure 4 Fault condition of large-capacity power supply
Download: Full size image Slideshow
2) When the capacity of one of the power supplies is particularly large
Figure 5 shows a branch fault of the largest power source (power source 1) in a multi-power DC microgrid. At this time, the current flowing through circuit breaker k1 is provided by power sources 2 and 3. If the capacity of power source 1 is much larger than the sum of the capacities of power sources 2 and 3, the current flowing through k1 will not reach the instantaneous protection setting value of the branch, and the fault location cannot be accurately achieved. Therefore, in the design of a DC microgrid, it should be avoided that the capacity of one power source is greater than the sum of the capacities of other power sources.
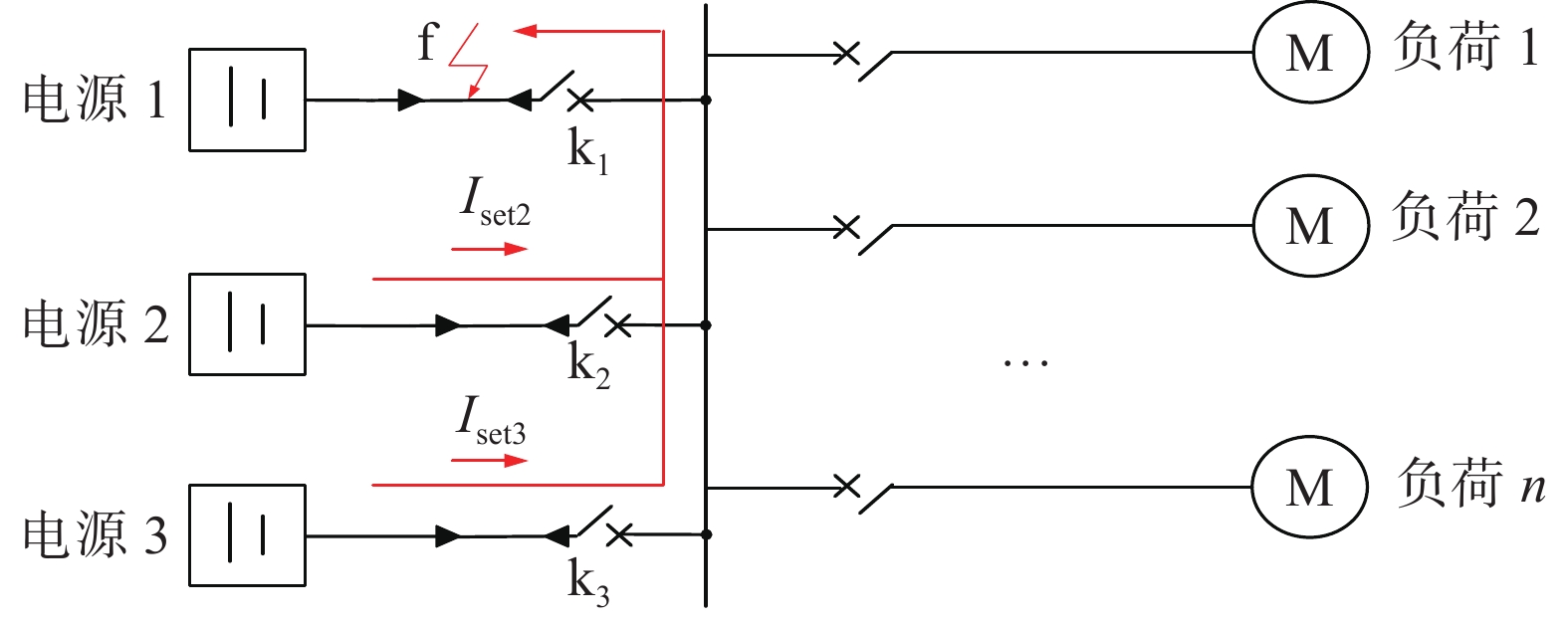
Figure 5 Fault situation at the power supply with the largest capacity
Download: Full size image Slideshow
This paper uses the power transient simulation software PSCAD/EMTDC to model and simulate the typical multi-power DC microgrid shown in Figure 6. The system parameters are shown in Table 1. The fault current autonomous control technology [ 19-20 ] is used in the simulation to make the fault current output by each branch power supply slightly less than 2 pu under a short-circuit fault. Since the photovoltaic power generation module can be equivalent to a current source, the fault current output is small without increasing the current limit, and the impact on the system is small, so there is no need to limit the current of this branch. A mechanical circuit breaker is used in the simulation with a breaking time of 20 ms. The rated current of each branch is shown in Table 2 .
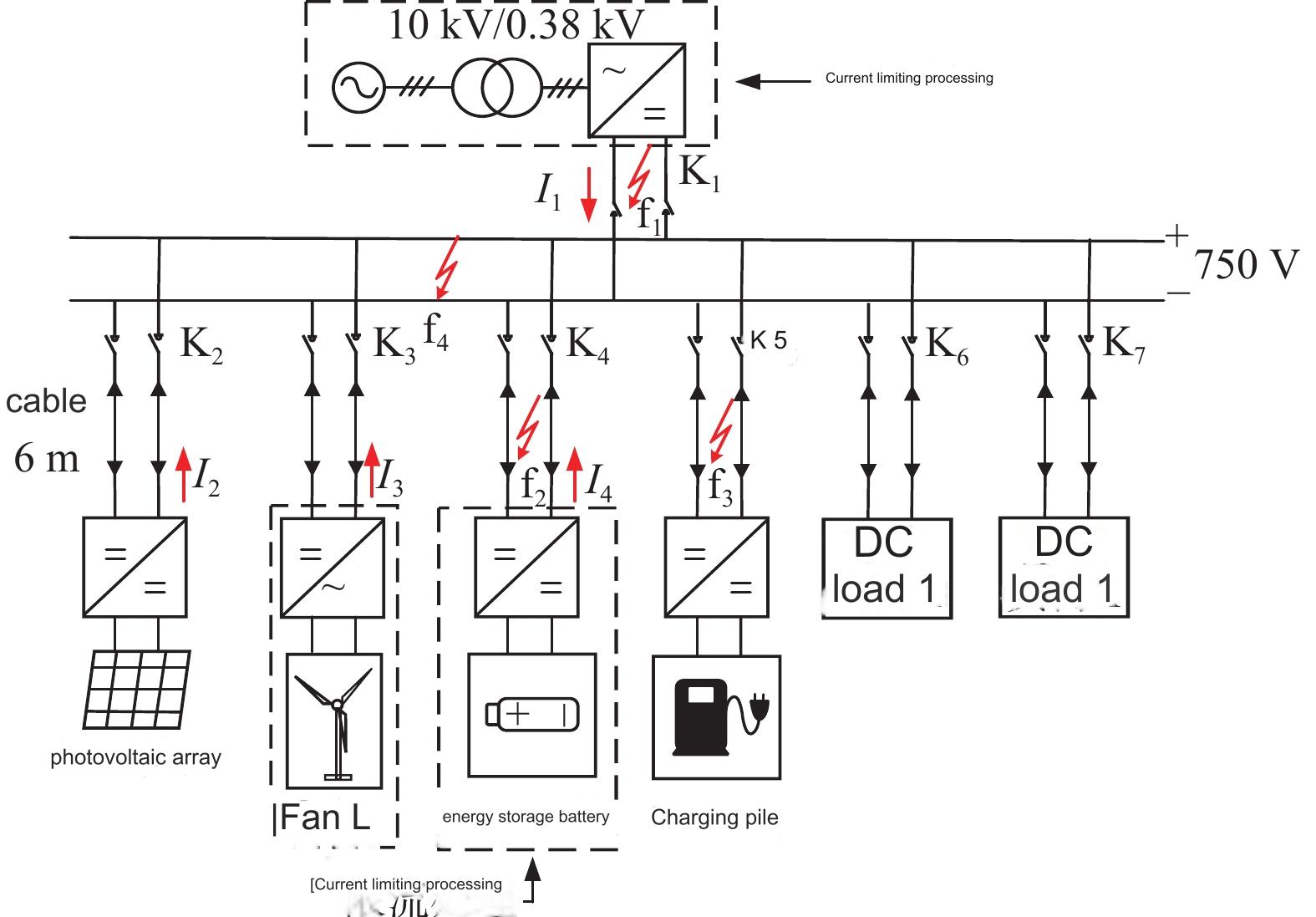
Figure 6 Typical multi-source DC microgrid structure
Download: Full size image Slideshow
Table 1 Typical parameters of multi-source DC microgrid system
Tab. 1 Typical parameters of DC microgrid systems with multiple power sources
| system | System parameters | Numeric |
| Busbar | Rated voltage/V | 750 |
| AC/DC access system | System capacity/kW | 500 |
| Photovoltaic power generation system | System capacity/kW | 150 |
| Wind power generation system | System capacity/kW | 300 |
| Energy Storage System | System capacity/kW | 200 |
| Charging Station | Rated power/kW | 200 |
| DC load 1, 2 | Rated power/kW | 300 |
Download: Export CSV
| Show table
Table 2 Rated current of each branch
Tab. 2 Rated current of each branch
| breaker | I /kA |
| K 1 | 0.667 |
| K 2 | 0.200 |
| K 3 | 0.400 |
| K 4 | 0.267 |
| K 5 | 0.267 |
| K 6 , K 7 | 0.400 |
Download: Export CSV
| Show table
Combined with Table 2 , the fault current control target of each power branch is set to no more than 2 pu. In the simulation, the fault current control target of the AC power branch is set to 1.1 kA, the fault current control target of the wind power generation branch is set to 0.7 kA, and the fault current control target of the energy storage battery branch is set to 0.45 kA.
According to the protection coordination principle in Section 2.2, the protection setting value of stage I of each power supply branch is set to be slightly less than 2 pu and greater than the fault current control target value; the protection setting value of stage II is slightly less than the branch fault current control value; the protection setting value of stage III is slightly greater than the maximum load current of normal operation; the protection setting value of stage I of each load branch is set to 2 times the rated current, the protection setting value of stage II is set to 1.5 times the rated current, and the protection setting value of stage III is set to 1.1 times the rated current; the photovoltaic power generation branch is equivalent to the load branch treatment. The protection setting values of each branch of the DC microgrid are shown in Table 3 , where K1 is the branch circuit breaker of the AC and DC access system, K2 is the branch circuit breaker of the photovoltaic power generation system, K3 is the branch circuit breaker of the wind power generation system, K4 is the branch circuit breaker of the energy storage system, K5 is the branch circuit breaker of the charging pile, and K6 and K7 are the branch circuit breakers of the DC load.
Table 3 Typical protection setting values of each branch of dual-power supply DC microgrid
Tab. 3 Typical setting values for protection of each branch of dual power supply DC microgrid kA
| breaker | Segment III (100 ms) | Segment II (30 ms) | Section I |
| K 1 | 0.73 | 1.00 | 1.30 |
| K 2 | 0.22 | 0.30 | 0.40 |
| K 3 | 0.44 | 0.60 | 0.80 |
| K 4 | 0.29 | 0.40 | 0.53 |
| K 5 | 0.29 | 0.40 | 0.53 |
| K 6 , K 7 | 0.44 | 0.60 | 0.80 |
Download: Export CSV
| Show table
Taking typical branch faults as an example, this paper simulates and verifies the AC access branch fault f1 , energy storage branch fault f2 , charging pile branch fault f3 and bus fault f4 in Figure 5 , and sets the fault occurrence time to 500 ms. Figure 7 shows the changes in branch currents under different faults.
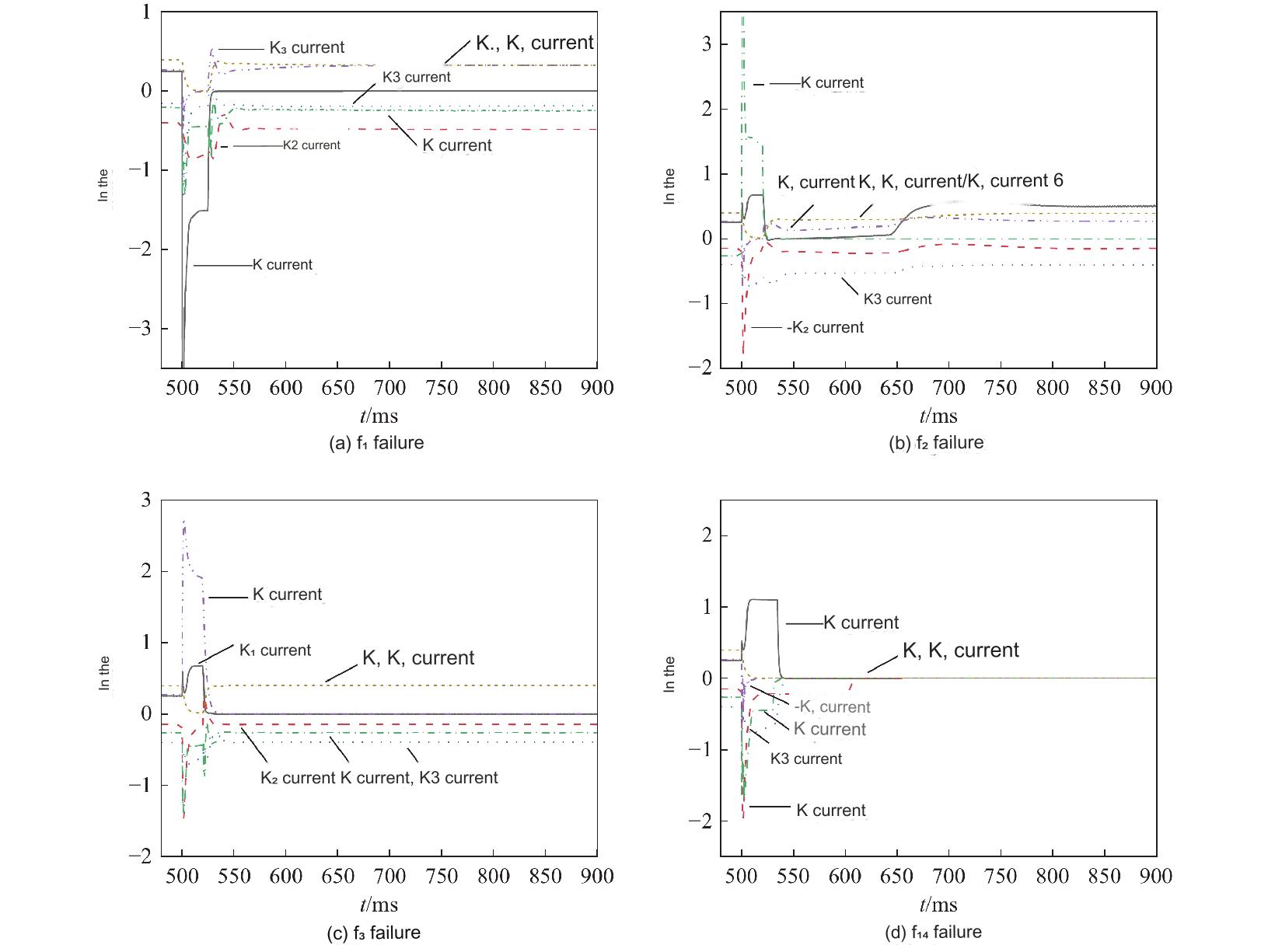
Figure 7 Current waveforms of each branch under different faults
Download: Full size image Slideshow
According to the simulation results, when the fault occurs at f1 , K1 reaches the protection setting value of stage I 0.1 ms after the fault occurs, and then quickly cuts off, and other branch circuit breakers do not operate; when the fault occurs at f2 , K4 reaches the protection setting value of stage I 0.1 ms after the fault occurs, and then quickly cuts off, K2 triggers stage I protection 0.2 ms after the fault, and as the current decreases, the protection returns, and other branch circuit breakers do not operate; when the fault occurs at f3 , K5 reaches the protection setting value of stage I 0.1 ms after the fault occurs, and then quickly cuts off, K2 triggers stage I protection 0.3 ms after the fault, and as the current decreases, the protection returns, and other branch circuit breakers do not operate.
When a busbar fault occurs, K1 reaches the setting value of stage II protection 5.9 ms after the fault occurs and disconnects 35.9 ms after the fault occurs. Since the current flowing through K2 will rise in a short time, stage I protection will be triggered. As the current drops rapidly, the protection returns, and K2 is disconnected by stage III protection 102.7 ms after the fault occurs. K3 reaches the setting value of stage II protection 3.2 ms after the fault occurs and disconnects 33.2 ms after the fault. As the current rises in a short time at the initial moment of the fault, K4 triggers stage I protection, and then the protection returns and disconnects 31 ms after the fault. K5 , K6 , and K7 do not operate.
In summary, when a short-circuit fault occurs, an overcurrent protection method combined with current limiting is adopted. Under branch fault conditions, the fault point can be quickly identified and removed. After the fault is removed, the system can quickly recover and operate normally. Under bus fault conditions, the photovoltaic power generation branch circuit breaker is disconnected after a long delay, and other power supply branch circuit breakers are disconnected after a short delay.
According to the fault current characteristics of DC microgrids, this paper analyzes the reasons why traditional overcurrent protection is difficult to be directly applied to DC microgrids, and proposes an overcurrent protection method based on fault current control. By matching the fault current control value, the setting value of the overcurrent protection is set to achieve extreme difference matching, so that the overcurrent protection has good selectivity in the DC microgrid. Under the premise of accurate control of the fault current, the protection setting principles are as follows:
1) Voltage source branch: The protection setting value of stage I is slightly less than 2 pu and greater than the fault current control target value; the protection setting value of stage II is slightly less than the branch fault current control value; the protection setting value of stage III is slightly greater than the maximum load current of normal operation.
2) Load branch: The protection setting value of stage I is 2 times the rated current, the protection setting value of stage II is 1.5 times the rated current, and the protection setting value of stage III is 1.1 times the rated current.
3) It is recommended to give certain consideration to the capacity configuration of each power source during the microgrid design process to avoid special situations.
This paper verifies the effectiveness of the proposed protection method by simulation analysis, and the research results can provide a certain reference for engineering design.
--- END ---
COPYRIGHT © HEYI ELECTRICS SOLUTION


